Первое - в своем посте ранее я не зря употребил слово "
достаточно". Двигателей для маневрирования может быть и больше, но что того, чтобы на месте сделать поворот в абсолютно любую точку -
достаточно иметь всего по одному на каждую линию координат.
Другой вопрос правда, чем создавать тормозное усилие для противодействия первоначальному движению?
")
Второе, немного неправильно мы оперируем понятиями. Есть две
раздельные дефиниции: двигатели маневрирования и двигатели ориентации.
Вот то, что мы обсуждаем - это скорее двигатели ориентации.
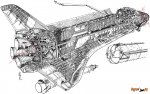
Не знаю как в Шаттле, но вот я нашел информацию по российскому Бурану:
Двигательная установка маневрирования и ориентации включает два ЖРД маневрирования и 44 ЖРД ориентации (реактивного управления); из них 38 основных и 6 вспомогательных, которые работают на монометилгидразине и четырехокиси азота. Конструктивно двигатели объединены в три двигательные установки: носовую и две кормовые, размещенные в двух боковых гондолах по обе стороны от киля. ЖРД ориентации обеспечивают заданную ориентацию ОК относительно центра масс по трем осям и поступательные перемещения в трех взаимно перпендикулярных плоскостях, причем основные ЖРД ориентации служат для быстрых разворотов, а вспомогательные - для управления в режиме точной ориентации.
Третье, не забывайте очень важный момент - реактивное усилие толкает тело в противоположную сторону от вектора реактивной струи. Но тут важный момент - что из себя представляет тело?
Говоря проще, я веду к тому, что располагать двигатели на мелких деталях и конечностях (например, кистях) это тупо. По причине того, что двигатель должен толкать весь доспех, а не его отдельную руку или кусок брони на юбке.